Científicos estadounidenses han desarrollado un novedoso dispositivo de muestreo suave, flexible y personalizable que puede ayudar en la recolección de diferentes tipos de organismos del mar sin dañarlos..
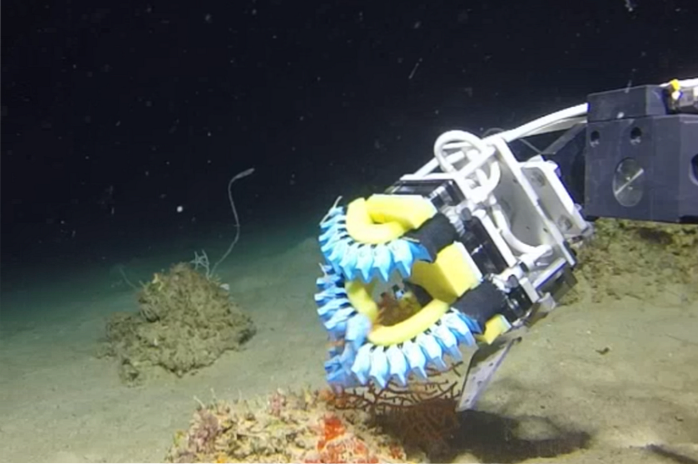
El dispositivo de "pinza blanda" que tiene de dos a cinco "dedos" hechos de poliuretano y otros materiales blandos que se abren y cierran mediante un sistema de bomba hidráulica de baja presión que utiliza agua de mar para impulsar su movimiento..
El estudio de los organismos marinos bajo el agua requirió equipo especializado montado en un vehículo operado por control remoto (ROV), ya que cualquier otro tipo de equipo podría romperse bajo presión..
"Muchos de los animales que encontramos en las profundidades marinas son especies nuevas y estos robots blandos nos permiten interactuar con delicadeza y estudiar un conjunto de fauna más diverso", dijo David Gruber, profesor de la City University of New York..
Las pinzas estaban unidas a una bola de madera que se sostenía y manipulaba con ROV, herramientas duras con forma de garra, controladas por un operador humano en el barco al que estaba atado el ROV..
En el estudio, publicado en la revista PLOS ONE, el equipo puso a prueba la última versión de sus pinzas blandas en un viaje a bordo del R / V Falkor en el remoto Área Protegida de las Islas Fénix en el Pacífico Sur..
Las pinzas blandas pudieron recolectar babosas marinas, corales, esponjas y otras especies marinas de manera mucho más efectiva y con menos daño que las herramientas tradicionales de muestreo submarino..
Según los comentarios de los operadores del ROV, el equipo imprimió extensiones de "uñas" en 3D que se podían agregar a los dedos de la pinza para ayudarlos a meterse debajo de las muestras que estaban asentadas en superficies duras..
También se agregó una malla flexible a cada dedo para ayudar a mantener las muestras contenidas dentro del agarre de los dedos..
También se creó otra versión de dos dedos de las pinzas en base a la familiaridad de los pilotos de ROV con el control de las pinzas de dos dedos existentes, y su solicitud de que los dos dedos puedan sostener muestras con una sujeción de "pellizco" (para objetos pequeños) y un agarre de "poder" (para objetos grandes).


